Download the Conference Proceedings
View the Conference Keynote Presentations
Conference Technical Presentations
 |
"Better Image Understanding Through Better Sensor Understanding," Michael Tusch, Apical
|
 |
"Efficient Super-Resolution Algorithms and Implementation Techniques for Constrained Applications," Ilan Yona, CEVA
|
 |
"Efficiently Computing Disparity Maps for Low-Cost 3D Stereo Vision," Tom Wilson, CogniVue
|
 |
"The DARPA Visual Media Reasoning Program," Mike Geertsen, DARPA
|
 |
"Implementing Real-Time Hyperspectral Imaging," Kalyanramu Vemishetty, National Instruments
|
 |
"Using Synthetic Image Generation to Reduce the Cost of Vision Algorithm Development," Clark Dorman, Next Century Corporation
|
 |
"Vision-Based Gesture User Interfaces," Francis MacDougall, Qualcomm
|
 |
"Using Heterogeneous Computing for Mobile and Embedded Vision," Rick Maule, Qualcomm
|
 |
"Tools for 'Democratizing' Computer Vision," Jayan Eledath, SRI International
|
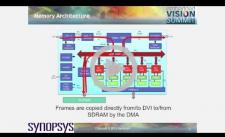 |
"Designing a Multi-Core Architecture Tailored for Pedestrian Detection Algorithms," Tom Michiels, Synopsys
|
 |
"Embedded Lucas-Kanade Tracking: How it Works, How to Implement It, and How to Use It," Goksel Dedeoglu, Texas Instruments
|
 |
"Using FPGAs to Accelerate 3D Vision Processing: A System Developer's View," Ken Lee, VanGogh Imaging
|
 |
"Feature Detection: How It Works, When to Use It, and a Sample Implementation," Marco Jacobs, videantis
|
View the Technology Showcase Demonstrations
Additional Information
If you have questions about the Embedded Vision Summit, contact us.














