AI is on the cusp of a revolution, driven by the convergence of several breakthroughs. These include large language models that can reason like humans, and the integration of natural language and computer vision through vision-language models (VLMs). In this keynote talk, Professor Trevor Darrell will present his group’s groundbreaking work, including methods for training vision models when labeled data is unavailable and techniques that enable robots to determine appropriate actions in novel situations. Much of Darrell’s work aims to overcome obstacles—such as massive memory and compute requirements—that limit the practical applications of state-of-the-art models. He will discuss approaches to making VLMs smaller and more efficient while retaining accuracy. He will also show how LLMs can be used as visual reasoning coordinators, overseeing the use of multiple task-specific models to enable superior performance.
Gérard Medioni, Vice President and Distinguished Scientist at Prime Video and Amazon MGM Studios, will discuss his work on the innovative Just Walk Out technology, as well as the Amazon One identity service. Moving to the world of entertainment, the session will also highlight the technology that powers Prime Video, including AI innovations that are improving the streaming experience for over 200 million Prime members worldwide. Attendees will gain insights into how these technologies are reshaping entertainment, and consider how they will evolve in the coming years to enhance viewer engagement, storytelling and personalization.
Why Attend? It's a First-Rate Program with Powerful Insights into Practical Perceptual AI.
Join us for three days of learning—from tutorials to Deep-Dive Day™, covering the latest technical insights, business trends and vision technologies—all with a focus on practical, deployable computer vision and AI. The Summit connects the theories from great academic conferences, like CVPR, to the concrete needs of innovators building real-world products.
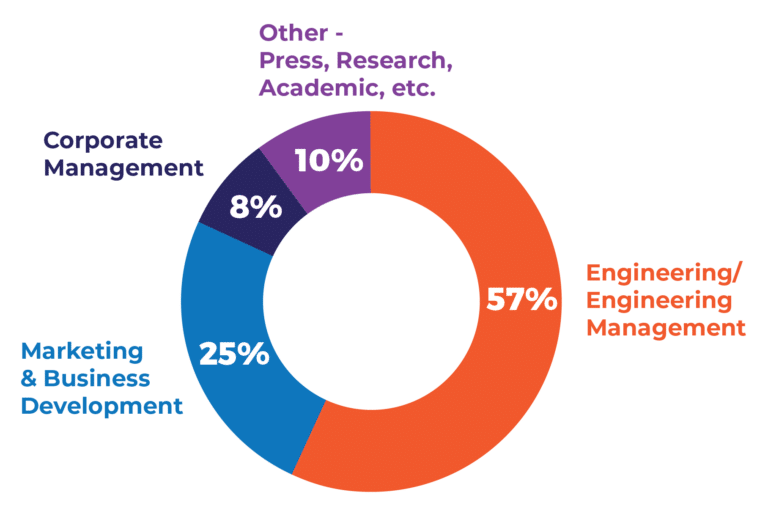
The Summit attracts a global audience
of technology professionals from companies developing
computer vision and edge AI-enabled products
including embedded systems,
cloud solutions and mobile
applications.
Learning Opportunities
Vision-language models (VLMs) promise to revolutionize computer vision—but how can you take advantage of them in real-world applications?
Most conferences are run by media or marketing companies whose specialty is, well, running as many conferences as they can—usually without any particular expertise in the subject matter.
Not us.
The Embedded Vision Summit is run by BDTI and the Edge AI and Vision Alliance. It’s the only conference we run. Our whole focus is the technology and business of edge AI and vision—it’s what we do, every day. For 30 years, BDTI’s engineers have designed, implemented and optimized algorithms on embedded systems, and for the last decade, our primary focus has been AI and computer vision at the edge.
We bring that expertise to the Summit each year. When we put together the Summit, we sweat every detail, asking ourselves, “If I were an attendee, what would I need to know? What critical questions do I need answered?” And we set about recruiting the best speakers with the most relevant expertise to answer those questions.
In essence: We build the conference that we’d like to attend, as technology and business innovators in this field.
Our target audience is people incorporating computer vision, perception and AI into products. They’re a practical bunch; they want to know what they can do today to build those products, and what’s coming tomorrow for next year’s products. We’re right there with them, and that’s the conference we’ve created.
This year will mark the 13th year of the Embedded Vision Summit. We’ve come a long way from our first event with a handful of talks and some demos in a hotel lobby in 2012. Over the years, we’ve learned a thing or two about delivering a high-quality conference for our attendees.
Large language models (LLMs) like chatbots are transforming AI, but multimodal LLMs, such as vision language models like LLaVA, which understand both text and images, could have a greater impact, as many AI tasks require both language and visual comprehension. We’ve gathered experts to discuss the challenges and potential of implementing multimodal LLMs at the edge for machine perception applications.
Connect
Building valuable business connections is crucial. At the Summit you can connect with engineers, marketers, executives—they’re all here! Here’s how:
Q&A Sessions: Join in on post-talk Q&A sessions and have your important questions answered directly by the expert speakers.
Meet the Exhibitors and Sponsors: Connect with key engineers and technologists from top computer vision building-block suppliers to learn about their latest processors, software, development tools and more.
Mingle at the Technology Exhibits Reception. The evening of Wednesday, May 21, enjoy great food and refreshing beverages while meeting new folks and seeing awesome tech demos at our Exhibits Reception!
See
65+ Exhibitors and Hundreds of Demos: Visit the exhibitors on the exhibit floor and see their latest technologies that enable perception—processors, algorithms, software, sensors, developer tools, services and more! You’ll get to see technology in action by watching cool demos from building-block component suppliers to learn about new and existing solutions to your business and engineering challenges.
Enabling Technologies Track: If you’re a product developer, engineer or business leader looking for real-world, commercial technologies that will help you add visual intelligence and AI to your new products, you’ll want to attend this track’s sessions. You can see things, like:
Processors and tools for deep-learning-based object recognition.
Optimized software components for low-cost, energy-efficient, real-time vision.
Frameworks and services for faster product development.
96% of Attendees Would Recommend the Summit to a Colleague…
The Summit is a great way to connect with peers, learn about what is going on in the industry and take back things that you didn’t know about.
Senior Machine Learning Engineer
-
Apple
It’s rare to find events where you actually have both [engineers and senior management] in the same room at the same time, so this event does gather this great cross-section. There really is something for everyone.
VP Global Automotive
-
TechInsights
If anybody’s really interested in understanding both the challenges and successes of deploying edge AI at scale, this is a great environment to be able to come and learn from those who have done it.
VP Marketing
-
AiM Future
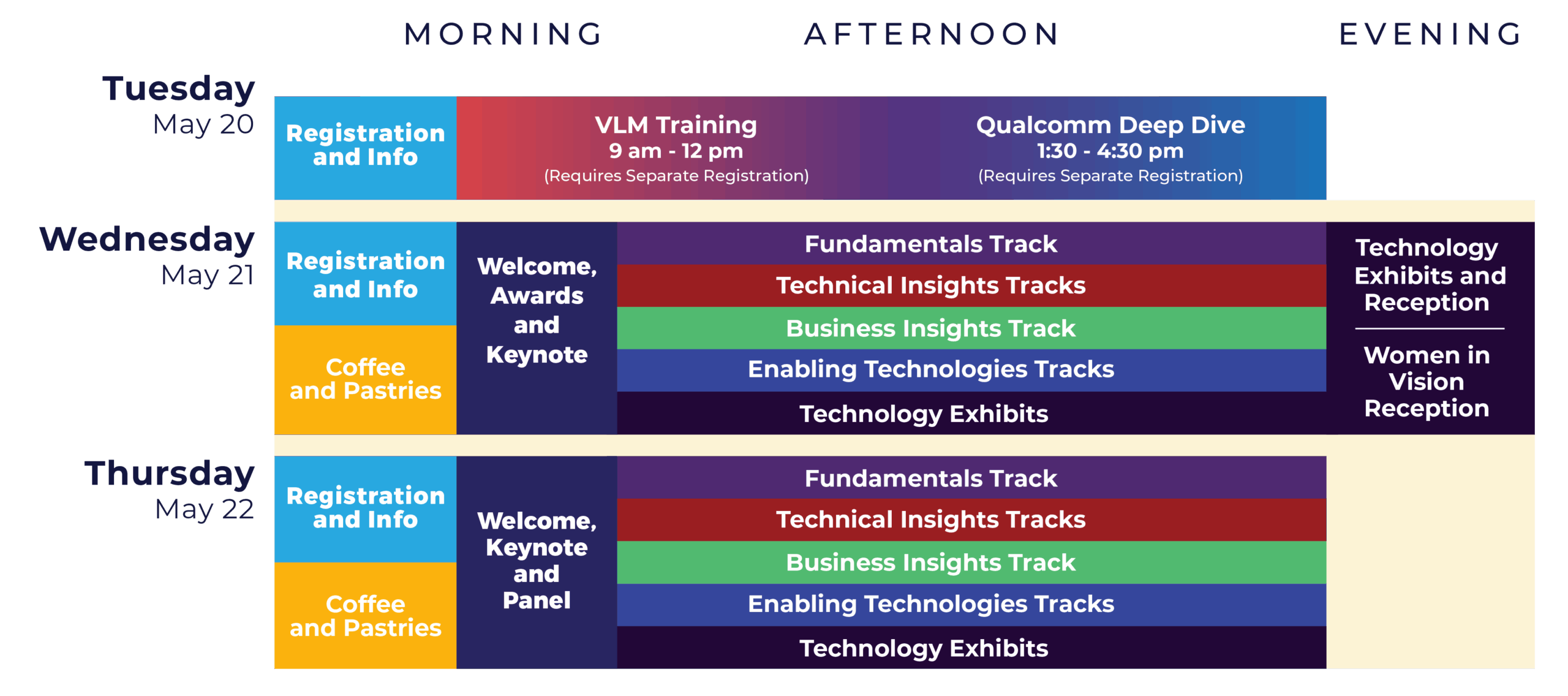
Summit 2025 Schedule at a Glance
Becoming a Sponsor or Exhibitor
Meet your newest, best leads.
Sponsoring or exhibiting is an amazing opportunity to engage with a uniquely qualified audience. Your company can be an integral part of the only global event dedicated to enabling product creators to harness computer vision and AI for practical applications.
The Summit brings together the most influential members of the global computer vision industry, including 1,000+ product and application developers, engineers, business leaders, top-level executives, industry visionaries, start-up innovators and more.
In 2024, 83% of attendees said they connected with potential suppliers or customers at the Summit!
")
")









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}