




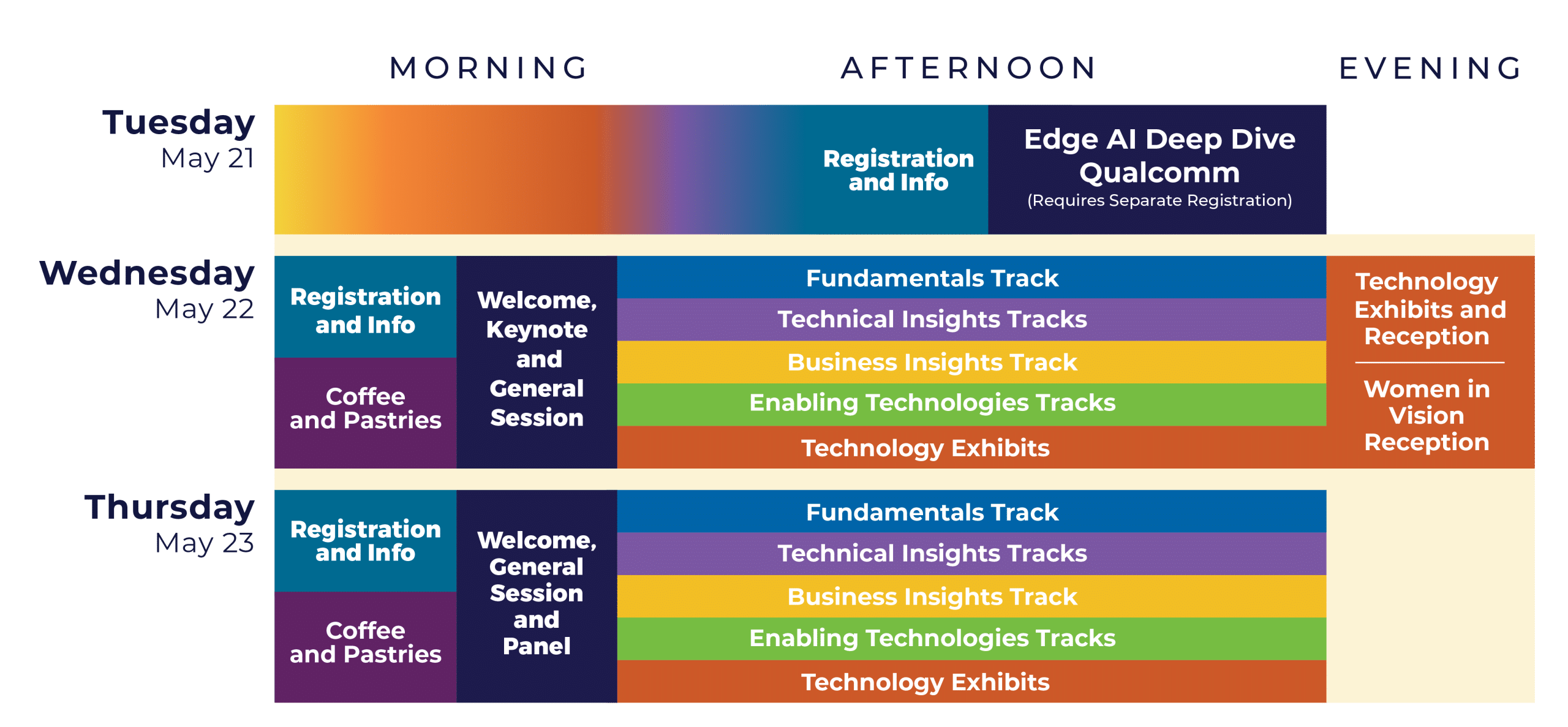
Join us for three days of learning—from tutorials to Deep-Dive Day, covering the latest technical insights, business trends and vision technologies—all with a focus on practical, deployable computer vision and visual/perceptual AI. The Summit connects the theories from great academic conferences, like CVPR, to the concrete needs of innovators building real-world products.
Most conferences are run by media or marketing companies whose specialty is, well, running as many conferences as they can—usually without any particular expertise in the subject matter.
Not us.
The Embedded Vision Summit is run by BDTI and the Edge AI and Vision Alliance. It’s the only conference we run. Our whole focus is the technology and business of edge AI and vision—it’s what we do, every day. For 30 years, BDTI’s engineers have designed, implemented and optimized algorithms on embedded systems, and for the last decade, our primary focus has been AI and computer vision at the edge.
We bring that expertise to the Summit each year. When we put together the Summit, we sweat every detail, asking ourselves, “If I were an attendee, what would I need to know? What critical questions do I need answered?” And we set about recruiting the best speakers with the most relevant expertise to answer those questions.
In essence: We build the conference that we’d like to attend, as technology and business innovators in this field.
Our target audience is people incorporating computer vision, perception and edge AI into products. They’re a practical bunch; they want to know what they can do today to build those products, and what’s coming tomorrow for next year’s products. We’re right there with them, and that’s the conference we’ve created.
This year will mark the 13th year of the Embedded Vision Summit. We’ve come a long way from our first event with a handful of talks and some demos in a hotel lobby in 2012. Over the years, we’ve learned a thing or two about delivering a high-quality conference for our attendees.
Every year we survey our attendees and 99% of last year’s attendees say they’d recommend this event to a colleague. <blush>
In order to deliver real-world insights and know-how into the most current topics in the industry to our attendees, we have packed the program with learning opportunities, including:
Speakers and Sessions: Learn from the best and listen to over 100 expert speakers who actively work in the industry present on the latest applications, techniques, technologies and opportunities in computer vision and visual AI.


100+ Exhibitors and Hundreds of Demos: Visit the exhibitors on the exhibit floor and see their latest technologies that enable perception—processors, algorithms, software, sensors, developer tools, services and more! You’ll get to see technology in action by watching cool demos from building-block component suppliers to learn about new and existing solutions to your business and engineering challenges.
Enabling Technologies Track: If you’re a product developer, engineer or business leader looking for real-world, commercial technologies that will help you add visual intelligence and AI to your new products, you’ll want to attend this track’s sessions. You can see things, like:
The field of computer vision is witnessing a transformative shift with the advent of versatile “generalist” models trained on vast, unlabeled datasets, displaying adaptability to new tasks with minimal supervision. In the 2024 keynote, Professor Lee will present groundbreaking research on creating intelligent systems that comprehend our multimodal world with minimal human supervision, using images and text—and other modalities like video, audio and LiDAR. Attendees will gain insights into efficiently repurposing existing foundation models for specialized tasks, addressing training cost challenges and unlocking the potential of multimodal machine perception in diverse applications.

Building valuable business connections is crucial. At the Summit you can connect with engineers, marketers, executives—they’re all here! Here’s how:


Sponsoring or exhibiting is an amazing opportunity to engage with a uniquely qualified audience. Your company can be an integral part of the only global event dedicated to enabling product creators to harness computer vision and visual AI for practical applications.
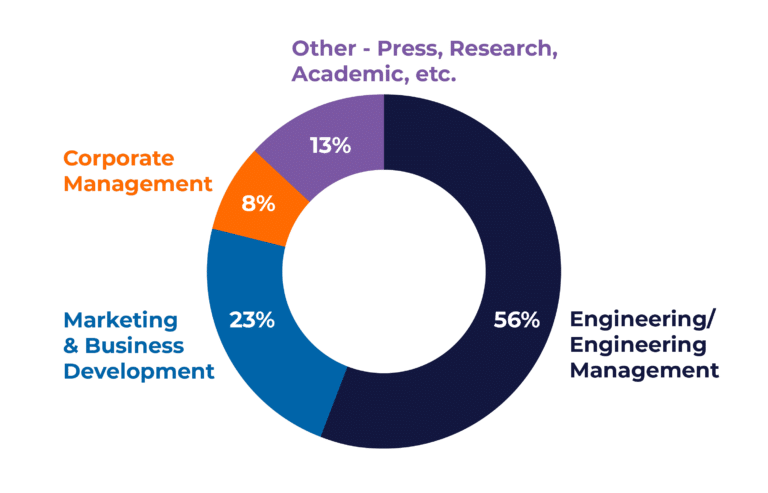
The Summit brings together the most influential members of the global computer vision industry, including 1,000+ product and application developers, engineers, business leaders, top-level executives, industry visionaries, start-up innovators and more.
In 2023, 92% of attendees said they connected with potential suppliers or customers at the Summit!
Learn about the newest speakers, sessions and other noteworthy details about the Summit Program by leaving us a few details.
![]()
Interested in sponsoring or exhibiting?
The Embedded Vision Summit gives you unique access to the best qualified technology buyers you’ll ever meet.
Want to contact us?
Use the small blue chat widget in the lower right-hand corner of your screen, or the form linked below.
STAY CONNECTED
Follow us on Twitter and LinkedIn.
![]()
![]()
![]()