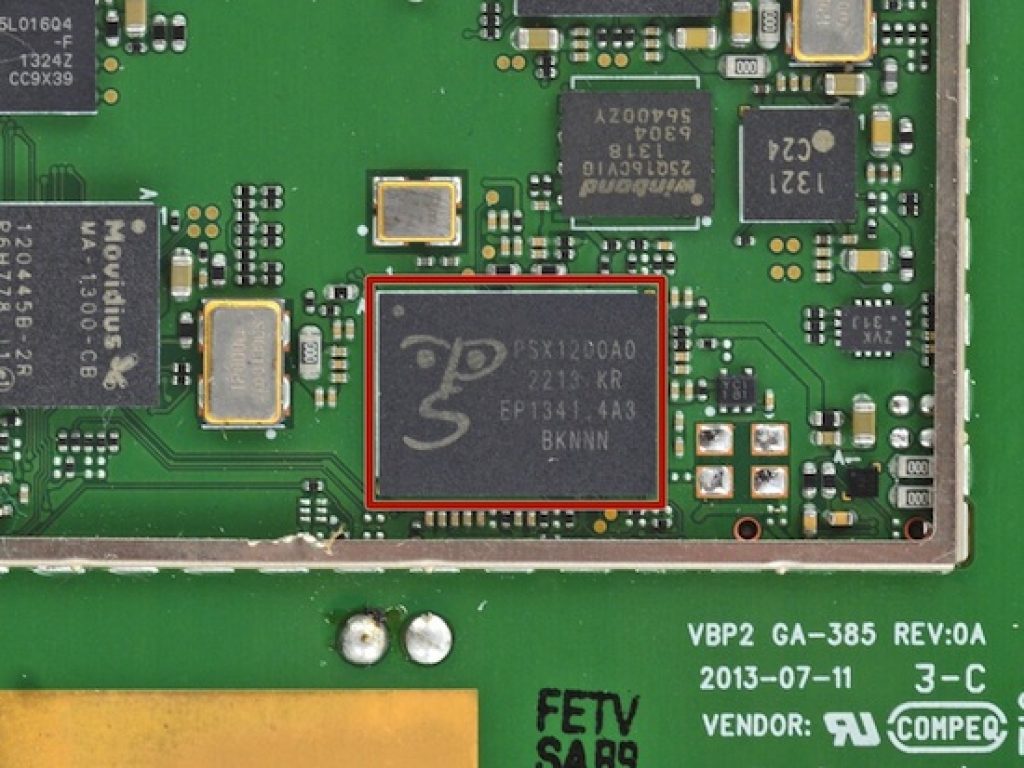
The past few weeks have been rich with depth-sensing smartphone news. Back in mid-March (with an early April follow-up), for example, I discussed HTC's One M8. And also in mid-March, I covered Google's Project Tango, showcasing 3D mapping and other compelling applications. A Project Tango prototype was disassembled by iFixit just the other day, in fact; in addition to the previously mentioned OmniVision image sensors and dual Movidius Myriad 1 vision co-processors, it turns out that Project Tango also includes an infrared projector and PrimeSense PSX1200 Capri PS1200 SoC (shown in the photo above).
If you're thinking "Kinect", you're on the right track. However, whereas Microsoft's first-generation game console and PC peripheral employed a PrimeSense-developed IC that generated a RGB color depth map via structured light technology, Capri's depth map is monochrome. The company also made other changes from the original Kinect-implemented IC to reduce cost and lower power consumption to a sufficient degree that PrimeSense could deem Capri appropriate for use in smartphones, tablets and other high volume consumer electronics devices. PrimeSense unveiled Capri in mid-December 2012, and demonstrated it at the January 2013 Consumer Electronics Show. Here are some relevant specs and other details, from a robotics-focused IEEE Spectrum writeup at the time:
Engineers are familiar with the idea of being able to pick two of the following: faster, better, cheaper. PrimeSense has instead gone with much smaller, probably cheaper (although we're not sure), and arguably just a little bit worse when it comes to performance. The overall size of the sensor has shrunk by a factor of 10, which is really the big news here, and otherwise, most of the specs have stayed the same. Here's what you'll get with Capri:
- Field of View 57.5×45
- Range 0.8m-3.5m
- VGA depth map (640×480)
- USB 2.0 powered
- Standard off the shelf components
- OpenNI compliant
PrimeSense told us that their focus was to "maintain" performance while focusing on miniaturization and cost reduction. And performance is nearly the same, with the exception of there being no RGB camera. This isn't great news for robotics, since having an integrated color camera is a nice feature, but we have to remember that we're just piggybacking on the fact that PrimeSense is really trying to get into the mobile market: Capri is small enough that it'll be able to fit into tablets (and eventually smartphones), and for pure 3D sensing, an RGB camera just adds cost and complexity that's unnecessary for the application. It's tough that robotics isn't yet a big enough market to allow us to dictate features for something like Capri, but as long as we can adapt this sort of technology to make robots cheaper and more capable, we'll get there.
Other coverage of Capri from that era include the following:
- PrimeSense reveals Capri, 'world's smallest' 3D sensor (Engadget)
- PrimeSense shows off tiny Capri sensor, yearns for 3D-sensing future (hands-on) (Engadget again)
- PrimeSense demonstrates Capri 3D sensor on Nexus 10 (hands-on) (Engadget yet again)
- Beyond Kinect, PrimeSense wants to drive 3D sensing into more everyday consumer gear (VentureBeat)
In mid-2013, Engadget published yet another article on the company, entitled "Life after Kinect: PrimeSense's plans for a post-Microsoft future". As it turns out, however, the technology enthusiastic site didn't mention PrimeSense's biggest plan of all. Beginning in July, rumors began circulating that Apple was contemplating an acquisition of the company. Claims of a completed acquisition appeared in mid-November, and Apple confirmed the purchase later that same month. Obviously, the Google Project Tango project was underway well before the transaction completed, thereby explaining Capri's presence on a design done by a notable Apple competitor.